Stepper Motor MSBPC20M21 5line 4phase 12V (RB0351) Products






| Name | Stepper Motor MSBPC20M21 5line 4phase 12V |
| Code | RB0351 |
| Price | Rs.330.00 |
| In Stock | Yes |
| Package | ROBOT |
Product Details
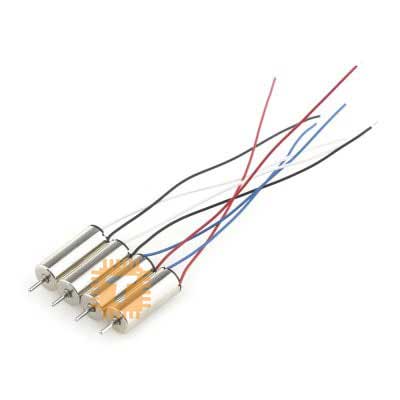
The MSBPC20M21 is a small-scale, unipolar stepper motor designed for low-torque, highly precise positioning applications. Utilizing a 5-wire, 4-phase internal configuration, this motor features a common center-tap wire that simplifies driving requirements. It is commonly operated using affordable, integrated Darlington transistor arrays like the ULN2003 or traditional unipolar driver boards, making it ideal for consumer appliances, HVAC louvers, and entry-level robotics projects.
Specifications
- Model Number: MSBPC20M21
- Operating Voltage: 12V DC
- Phase Configuration: 4-Phase Unipolar
- Wire Count: 5 wires
- Step Angle: Typically 5.625℃ (64 steps per raw internal revolution)
- Gear Reduction Ratio: Often features an internal gear reduction (commonly 1:64), resulting in a fine output step angle of Approx 0.088℃ (4096 steps per full output shaft revolution).
- Direct Current (DC) Resistance: High internal phase resistance, allowing it to run directly at 12V without constant-current switching.
- Excitation Mode: 1-2 phase excitation (half-step) or 2-phase excitation (full-step).
Core Features
- Built-in Gear Reduction: Most motors in this class feature an internal spur gearbox. This geometry multiplies the mechanical output torque significantly while providing microscopic positional step control, though it limits maximum rotational speed.
- Unipolar Control Semantics: Because the motor shares a common power line across all internal coils, the driving circuit only needs to pull individual phase wires to ground sequentially. This removes the need for complex H-bridge circuits required by 4-wire bipolar motors.
- Quiet & Power-Efficient: Runs smoothly with minimal electrical resonance noise, making it suitable for quiet indoor domestic environments.
- Standard JST Termination: Usually comes pre-terminated with a 5-pin JST-XH or similar pitch connector, making it plug-and-play with common ULN2003 driver modules.
Common Applications
- Air Conditioner Louvers: Controlling the slow, sweeping movement of automated air-deflection flaps in split-system AC units.
- Security Pan/Tilt Cameras: Driving low-speed, highly repeatable movement axes for security camera mounts.
- Automated Valving: Powering motorized fluid valves or air dampers inside commercial HVAC networks.
- DIY Robotics: Operating steering linkages, optical sensor sweeps, or indexer wheels where high speed is not required.
Usage & Programming Tips
- Sequence Programming: To make the motor turn smoothly, you must pulse the inputs in a strict sequential wave. For standard 4-step sequence (Full-Step Mode), ground the phases in this pattern:
A -> B -> C -> D -> repeat. Reversing the sequence (D -> C -> B -> A) reverses the physical rotation. - Voltage Discipline: Ensure you supply a dedicated 12V source to the driver board for the motor. Do not attempt to run this motor off the 5V output pin of a microcontroller; it will lack the torque to overcome its internal gearbox friction and will likely stall or fail to move entirely.
- Speed Threshold Warning: Due to the high internal gear reduction, this motor is not built for high speeds. Attempting to step the motor too fast (>15–20RPM) will cause it to bind up, slip internally, or completely drop steps. Keep stepping intervals modest for the highest accuracy.
- No External Holding Brake Needed: The combination of permanent magnets inside and the steep mechanical advantage of the internal spur gears gives this motor strong passive detent torque, meaning it holds its physical position remarkably well even when completely powered off
Sharing is caring, show love and share the product with your friends.
Featured

Add to Cart

Add to Cart